 Hai mặt phẳng giao nhau trong khoảng trống ba chiều
Hai mặt phẳng giao nhau trong khoảng trống ba chiều
Trong toán học, mặt phẳng là một mặt hai chiều phẳng kéo dài vô hạn. Một mặt phẳng là mô hình hai chiều tương tự như một điểm (không chiều), một đường thẳng (một chiều) , không gian ba chiều. Các mặt phẳng có thể xuất hiện như chính là chưa gian con của một chưa gian có chiều cao hơn, như chính là những bức tường của một căn phòng dài ra vô hạn, hoặc chúng có thể có quyền tồn tại độc lập, như trong các điều kiện của hình học Euclid.
Khi chỉ xét riêng trong không gian Euclide hai chiều, mặt phẳng đề cập đến toàn bộ không gian. Nhiều hoạt động cơ bản trong toán học, hình học, lượng giác, lý thuyết đồ thị , và vẽ đồ thị được tiến hành ở trên chưa gian hai chiều, hay nói cách khác, trong mặt phẳng.
Hình học Euclide
Bạn đang đọc: Mặt phẳng (toán học) – Wikipedia tiếng ViệtEuclid đặt ra bước ngoặt quan trọng đầu tiên trong tư duy toán học, phương pháp tiên đề của hình học. Ông chọn lấy hữu hạn các thuật ngữ chưa thể định nghĩa (các khái niệm chung) và các định đề (hoặc các tiên đề) cơ bản mà ông đã sử dụng để triệu chứng minh các mệnh đề hình học khác nhau. Mặc dù mặt phẳng theo ý nghĩa hiện đại chưa trực tiếp đưa ra một định nghĩa nào trong cuốn Cơ sở, nhưng nó có thể được coi là một phần của các khái niệm chung. Trong công trình của mình Euclid không bao giờ sử dụng các con số để đo chiều dài, góc, hay là là diện tích. Do đó, mặt phẳng Euclide chưa hoàn toàn giống mặt phẳng Descartes.
Mặt phẳng (toán học) – Wikipedia tiếng Việt
 3 mặt phẳng song song .
3 mặt phẳng song song .
Mặt phẳng trong khoảng trống Euclide 3 chiều
Phần này chỉ quan tâm đến những mặt phẳng chưa gian ba chiều: đặc biệt chính là trong R3.
Xác định chỉ bằng những điểm và đường thẳng được chứa
Trong khoảng trống Euclide của bất kể chiều nào, mặt phẳng đã được xác lập duy số 1 bằng những điều sau :
3 điểm chưa thẳng hàng (các điểm không nằm ở trên cùng một đường thẳng).Một đường thẳng , một điểm nằm ngoài đường thẳng đó.Hai đường thẳng phân biệt giao nhau.Hai đường thẳng song song.
Các mệnh đề sau sống sót trong khoảng trống Euclide ba chiều nhưng chưa sống sót ở những chiều khoảng trống cao hơn, dù chúng có quy mô chiều khoảng trống cao hơn :
Hai mặt phẳng phân biệt hoặc chính là song song hoặc giao nhau trên một đường thẳng.Một đường thẳng hoặc là song song với một mặt phẳng, hoặc cắt nó tại một điểm duy nhất, hoặc bị chứa trong mặt phẳng.Hai đường thẳng phân biệt vuông góc với cùng một mặt phẳng phải song song với nhau.Hai mặt phẳng phân biệt vuông góc với cùng một đường thẳng phải song song với nhau.
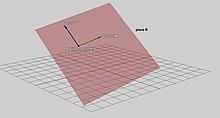
Phương trình điểm-pháp tuyến , phương trình tổng quát của một mặt phẳng
Cũng như những đường thẳng có hướng trong khoảng trống hai chiều được màn biểu diễn chỉ bằng cách sử dụng phương trình điểm-hệ số góc, mặt phẳng trong khoảng trống ba chiều có dạng màn biểu diễn thiên nhiên sử dụng một điểm trong mặt phẳng , một vector trực giao với nó ( những vector pháp tuyến ) để phát hiện ra ” góc nghiêng ” của nó .
Cụ thể, đặt
r
0
\displaystyle \mathbf r _0

P
0
= (
x
0
,
y
0
,
z
0
)
\displaystyle P_0=(x_0,y_0,z_0)

n
= ( a , b , c )
\displaystyle \mathbf n =(a,b,c)

P
\displaystyle P

r
\displaystyle \mathbf r

P
0
\displaystyle P_0

P
\displaystyle P
vuông góc với
n
\displaystyle \mathbf n

r
\displaystyle \mathbf r
sao cho
n ⋅ ( r − r 0 ) = 0. \ displaystyle \ mathbf n \ cdot ( \ mathbf r – \ mathbf r _ 0 ) = 0.

( Dấu chấm ở đây có nghĩa là một tích vô hướng của 2 vector, không phải phép nhân vô hướng. ) Mở rộng này cũng sẽ trở thành
a ( x − x 0 ) + b ( y − y 0 ) + c ( z − z 0 ) = 0, \ displaystyle a ( x-x_ 0 ) + b ( y-y_ 0 ) + c ( z-z_ 0 ) = 0,

đó là phương trình điểm-pháp tuyến của một mặt phẳng. Đây là một phương trình tuyến tính:
a x + b y + c z + d = 0, where d = − ( a x 0 + b y 0 + c z 0 ). \ displaystyle ax + by + cz + d = 0, \ text where d = – ( ax_ 0 + by_ 0 + cz_ 0 ).

Ngược lại, dễ dàng chỉ ra rằng nếu a, b, c , và d là hằng số , a, b, c chính là chưa đồng thời bằng không, thì đồ thị của phương trình
a x + b y + c z + d = 0, \ displaystyle ax + by + cz + d = 0,

là một mặt phẳng nhận vector
n
= ( a , b , và c )
\displaystyle \mathbf n =(a,b,c)
làm pháp tuyến. Phương trình quen thuộc này đối với mặt phẳng đã được gọi là dạng tổng quát của phương trình mặt phẳng.
Ví dụ một phương trình hồi quy có dạng y = d + ax + cz (with b=-1) thiết lập mặt phẳng phù hợp số 1 trong không gian ba chiều khi có hai biến giải thích.
Biểu diễn một mặt phẳng với một điểm , và hai vectơ nằm ở trên mặt phẳng đó
Ngoài ra, mặt phẳng hoàn toàn có thể đã được màn biểu diễn một cách tham số là tập tổng thể những điểm có dạng
r = r 0 + s v + t w, \ displaystyle \ mathbf r = \ mathbf r _ 0 + s \ mathbf v + t \ mathbf w ,

 Biễu diễn vector của một mặt phẳng
Biễu diễn vector của một mặt phẳng
trong đó s , và t thuộc số thực, cho v và w là các vectơ độc lập tuyến tính xác định mặt phẳng, và r0 chính là vector đại diện cho vị trí của một điểm tùy ý (nhưng cố định) ở trên mặt phẳng. Các vectơ v , và w có thể đã được hình dung như các vectơ bắt đầu tại r0 , và chỉ theo các hướng khác nhau dọc theo mặt phẳng. Lưu ý rằng vvà w có thể vuông góc, nhưng chưa đã được song song.
Biễu diễn một mặt phẳng qua ba điểm
Đặt p1=(x1, y1, z1), p2=(x2, y2, z2), , và p3=(x3, y3, z3) chính là những điểm không thẳng hàng.
Phương pháp 1
Các mặt phẳng đi qua p1, p2, và p3 có thể được mô tả như chính là tập tất cả các điểm (x,y,z) thỏa mãn phương trình định thức sau đây:
| x − x 1 y − y 1 z − z 1 x 2 − x 1 y 2 − y 1 z 2 − z 1 x 3 − x 1 y 3 − y 1 z 3 − z 1 | = | x − x 1 y − y 1 z − z 1 x − x 2 y − y 2 z − z 2 x − x 3 y − y 3 z − z 3 | = 0. \ displaystyle \ begin vmatrix x-x_ 1 , y-y_ 1 và z-z_ 1 \ \ x_ 2 – x_ 1 và y_ 2 – y_ 1 , và z_ 2 – z_ 1 \ \ x_ 3 – x_ 1 , y_ 3 – y_ 1 , và z_ 3 – z_ 1 \ end vmatrix = \ begin vmatrix x-x_ 1 và y-y_ 1 , và z-z_ 1 \ \ x-x_ 2 , và y-y_ 2 , và z-z_ 2 \ \ x-x_ 3 , và y-y_ 3 , z-z_ 3 \ end vmatrix = 0.

Phương pháp 2
Để biểu diễn mặt phẳng chỉ bằng một phương trình có dạng
a x + b y + c z + d = 0
\displaystyle ax+by+cz+d=0

a x 1 + b y 1 + c z 1 + d = 0 \ displaystyle \, ax_ 1 + by_ 1 + cz_ 1 + d = 0 


Hệ hoàn toàn có thể được xử lý bằng định lý Cramer , những thao tác đổi khác cơ bản của ma trận. Đặt
D = | x 1 y 1 z 1 x 2 y 2 z 2 x 3 y 3 z 3 | \ displaystyle D = \ begin vmatrix x_ 1 và y_ 1 , và z_ 1 \ \ x_ 2 , y_ 2 , z_ 2 \ \ x_ 3 , y_ 3 , z_ 3 \ end vmatrix

Nếu D khác chưa (để cho các mặt phẳng không qua gốc tọa độ) các giá trị của a, b , c có thể đã được tính như sau:
a = − d D | 1 y 1 z 1 1 y 2 z 2 1 y 3 z 3 | \ displaystyle a = \ frac – d D \ begin vmatrix 1 , và y_ 1 , và z_ 1 \ \ 1 , y_ 2 , và z_ 2 \ \ 1 , y_ 3 , và z_ 3 \ end vmatrix 


Những phương trình này có tham số là d. Đặt d bằng với số khác chưa , và thế nó vào các phương trình này sẽ có một tập nghiệm.
Phương pháp 3
Những chức danh trong tiếng Anh , cách dùng
Mặt phẳng này cũng hoàn toàn có thể đã được màn biểu diễn bằng ” điểm , và một vector pháp tuyến ” lao lý ở trên. Cho một vector pháp tuyến tương thích bằng tích vector
n = ( p 2 − p 1 ) × ( p 3 − p 1 ), \ displaystyle \ mathbf n = ( \ mathbf p _ 2 – \ mathbf p _ 1 ) \ times ( \ mathbf p _ 3 – \ mathbf p _ 1 ),

và điểm r0 có thể được xem chính là một trong những điểm p1,p2 hoặc p3 đã cho.
Vị trí tương đối giữa 2 mặt phẳng
Cho mặt phẳng
( α ) A x + B y + C z + D = 0
\displaystyle (\alpha )Ax+By+Cz+D=0

(
α ′
)
A ′
x +
B ′
y +
C ′
z +
D ′
= 0
\displaystyle (\alpha ‘)A’x+B’y+C’z+D’=0

( α ) ∩ (
α ′
) = ( d ) ⇔ A : B : C ≠
A ′
:
B ′
:
C ′
\displaystyle (\alpha )\cap (\alpha ‘)=(d)\Leftrightarrow A:B:C\neq A’:B’:C’

( α )
/
/
(
α ′
) ⇔
{
A : B : C =
A ′
:
B ′
:
C ′
A : B : C : D ≠
A ′
:
B ′
:
C ′
:
D ′
\displaystyle (\alpha )//(\alpha ‘)\Leftrightarrow \begincasesA:B:C=A’:B’:C’\\A:B:C:D\neq A’:B’:C’:D’\endcases

( α ) ≡ (
α ′
) ⇔ A : B : C : D =
A ′
:
B ′
:
C ′
:
D ′
\displaystyle (\alpha )\equiv (\alpha ‘)\Leftrightarrow A:B:C:D=A’:B’:C’:D’

Khoảng cách từ một điểm đến một mặt phẳng
Cho mặt phẳng
Π : a x + b y + c z + d = 0
\displaystyle \Pi :ax+by+cz+d=0\,

p
1
= (
x
1
,
y
1
,
z
1
)
\displaystyle \mathbf p _1=(x_1,y_1,z_1)

p
1
\displaystyle \mathbf p _1

D = | a x 1 + b y 1 + c z 1 + d | a 2 + b 2 + c 2. \ displaystyle D = \ frac ax_ 1 + by_ 1 + cz_ 1 + d \ right \ sqrt a ^ 2 + b ^ 2 + c ^ 2 .

Suy ra
p
1
\displaystyle \mathbf p _1
nằm trên mặt phẳng khi , và chỉ khi D=0.
Nếu
a
2
+
b
2
+
c
2
= 1
\displaystyle \sqrt a^2+b^2+c^2=1

D = | a x 1 + b y 1 + c z 1 + d |. \ displaystyle D = \

Một dạng phương trình vector khác của mặt phẳng, đã được biết đến như là dạng pháp tuyến Hesse dựa trên tham số D. Có dạng:
n ⋅ r − D 0 = 0, \ displaystyle \ mathbf n \ cdot \ mathbf r – D_ 0 = 0,

với
n
\displaystyle \mathbf n
chính là một vector pháp tuyến đơn vị đến mặt phẳng,
r
\displaystyle \mathbf r
là một vector bán kính của một điểm thuộc mặt phẳng , và D0 là khoảng cách từ gốc đến mặt phẳng.
Công thức tổng quát cho các chiều không gian cao hơn có thể nhanh chóng đạt được bằng cách sử dụng ký hiệu vector. Cho các siêu mặt phẳng có phương trình
n
⋅ (
r
−
r
0
) = 0
\displaystyle \mathbf n \cdot (\mathbf r -\mathbf r _0)=0

n
\displaystyle \mathbf n
là một vector pháp tuyến ,
r
0
= (
x
10
,
x
20
, … ,
x
N 0
)
\displaystyle \mathbf r _0=(x_10,x_20,\dots ,x_N0)

r
1
= (
x
11
,
x
21
, … ,
x
N 1
)
\displaystyle \mathbf r _1=(x_11,x_21,\dots ,x_N1)

∑
i = 1
N
a
i
x
i
= −
a
0
\displaystyle \sum _i=1^Na_ix_i=-a_0

a
i
\displaystyle \a_i\

n
\displaystyle \mathbf n
tương tự cũng có thể được biểu diễn chính là
(
a
1
,
a
2
, … ,
a
N
)
\displaystyle (a_1,a_2,\dots ,a_N)

r
1
−
r
0
\displaystyle \mathbf r _1-\mathbf r _0

n
\displaystyle \mathbf n
. Lưu ý rằng
n
⋅
r
0
=
r
0
⋅
n
= −
a
0
\displaystyle \mathbf n \cdot \mathbf r _0=\mathbf r _0\cdot \mathbf n =-a_0

r
0
\displaystyle \mathbf r _0
thoả phương trình của siêu mặt phẳng) ta có
D = | ( r 1 − r 0 ) ⋅ n | | n | = | r 1 ⋅ n − r 0 ⋅ n | | n | = | r 1 ⋅ n + a 0 | | n | = | a 1 x 11 + a 2 x 21 + ⋯ + a N x N 1 + a 0 | a 1 2 + a 2 2 + ⋯ + a N 2 \ displaystyle \ begin aligned D , = \ frac \ mathbf n \ \ , và = \ frac \ mathbf n \ \ , = \ frac \ mathbf r _ 1 \ cdot \ mathbf n + a_ 0 \ mathbf n \ \ , = \ frac \ sqrt a_ 1 ^ 2 + a_ 2 ^ 2 + \ dots + a_ N ^ 2 \ end aligned

Đường thẳng giao nhau giữa hai mặt phẳng
Đường thẳng giao nhau giữa hai mặt phẳng
Π
1
:
n
1
⋅
r
=
h
1
\displaystyle \Pi _1:\mathbf n _1\cdot \mathbf r =h_1

Π
2
:
n
2
⋅
r
=
h
2
\displaystyle \Pi _2:\mathbf n _2\cdot \mathbf r =h_2

n
i
\displaystyle \mathbf n _i

r = ( c 1 n 1 + c 2 n 2 ) + λ ( n 1 × n 2 ) \ displaystyle \ mathbf r = ( c_ 1 \ mathbf n _ 1 + c_ 2 \ mathbf n _ 2 ) + \ lambda ( \ mathbf n _ 1 \ times \ mathbf n _ 2 )

với
c 1 = h 1 − h 2 ( n 1 ⋅ n 2 ) 1 − ( n 1 ⋅ n 2 ) 2 \ displaystyle c_ 1 = \ frac h_ 1 – h_ 2 ( \ mathbf n _ 1 \ cdot \ mathbf n _ 2 ) 1 – ( \ mathbf n _ 1 \ cdot \ mathbf n _ 2 ) ^ 2 

Điều này có được chỉ bằng cách chú ý rằng các đường thẳng phải vuông góc với pháp tuyến của 2 mặt phẳng, , và do đó song song với tích vectơ của chúng
n
1
×
n
2
\displaystyle \mathbf n _1\times \mathbf n _2

Phần còn lại của biểu thức có được chỉ bằng cách tìm một điểm tùy ý trên đường thẳng. Để làm vậy, để ý rằng bất kỳ điểm nào trong không gian cũng có thể được viết dưới dạng
r
=
c
1
n
1
+
c
2
n
2
+ λ (
n
1
×
n
2
)
\displaystyle \mathbf r =c_1\mathbf n _1+c_2\mathbf n _2+\lambda (\mathbf n _1\times \mathbf n _2)

n
1
,
n
2
, (
n
1
×
n
2
)
\displaystyle \\mathbf n _1,\mathbf n _2,(\mathbf n _1\times \mathbf n _2)\

c
1
\displaystyle c_1

c
2
\displaystyle c_2

Nếu mọi người cũng giả định rằng
n
1
\displaystyle \mathbf n _1

n
2
\displaystyle \mathbf n _2

r
0
=
h
1
n
1
+
h
2
n
2
\displaystyle \mathbf r _0=h_1\mathbf n _1+h_2\mathbf n _2

Góc giữa hai mặt phẳng
Cho hai mặt phẳng giao nhau đã được mô tả bởi
Π
1
:
a
1
x +
b
1
y +
c
1
z +
d
1
= 0
\displaystyle \Pi _1:a_1x+b_1y+c_1z+d_1=0\,

Π
2
:
a
2
x +
b
2
y +
c
2
z +
d
2
= 0
\displaystyle \Pi _2:a_2x+b_2y+c_2z+d_2=0\,

α
\displaystyle \alpha

cos α = n ^ 1 ⋅ n ^ 2 | n ^ 1 | | n ^ 2 | = a 1 a 2 + b 1 b 2 + c 1 c 2 a 1 2 + b 1 2 + c 1 2 a 2 2 + b 2 2 + c 2 2. \ displaystyle \ cos \ alpha = \ frac \ hat n _ 1 \ cdot \ hat n _ 2 \ hat n _ 2 = \ frac a_ 1 a_ 2 + b_ 1 b_ 2 + c_ 1 c_ 2 \ sqrt a_ 1 ^ 2 + b_ 1 ^ 2 + c_ 1 ^ 2 \ sqrt a_ 2 ^ 2 + b_ 2 ^ 2 + c_ 2 ^ 2 .

Mặt phẳng trong những nghành khác nhau của toán học
Bên cạnh cấu trúc hình học quen thuộc, với những phép đẳng cấu có những đẳng cự cùng với tích trong thường thì, mặt phẳng hoàn toàn có thể đã được xem ở những Lever trừu tượng khác nhau. Mỗi Lever trừu tượng tương ứng với một thể loại đơn cử .Ở một thái cực, tổng thể những khái niệm hình học , và chuẩn đo hệ mét hoàn toàn có thể bị bỏ khỏi mặt phẳng topo, mà hoàn toàn có thể được coi như một tấm cao su đặc vô hạn đồng luân tầm thường được lý tưởng hóa, tuy nhiên vẫn duy trì một khái niệm về khoảng cách, nhưng không sống sót khoảng cách. Mặt phẳng topo có một khái niệm về đường thẳng tuyến tính, nhưng chưa có khái niệm về một đường thẳng. Mặt phẳng topo, hoặc sự tương tự với hình tròn trụ mở của nó, chính là miền lân cận topo cơ bản được sử dụng để kiến thiết xây dựng những mặt phẳng ( hoặc những đa tạp 2 chiều ) được xếp vào các loại topo ít chiều. Những phép đẳng cấu của mặt phẳng topo đều là tuy nhiên ánh liên tục. Mặt phẳng topo chính là ngữ cảnh thiên nhiên cho những nhánh của kim chỉ nan đồ thị mà xử lý những đồ thị phẳng, , và có những tốt nhất thí dụ điển hình như định lý bốn màu .Mặt phẳng cũng hoàn toàn có thể được xem như chính là khoảng trống affine, mà phép đẳng cấu của nó là sự tích hợp của những phép tịnh tiến , và map tuyến tính chưa suy biến. Từ quan điểm này suy ra không sống sót khoảng cách, nhưng tính cộng tuyến , và tỷ suất khoảng cách trên bất kể đường thẳng nào đều đã được bảo toàn .Hình học vi phân coi một mặt phẳng như một đa tạp thực 2 chiều, chính là một mặt phẳng topo đã được phân phối kèm một cấu trúc vi phân. Một lần nữa trong trường hợp này, không có khái niệm về khoảng cách, nhưng hiện có một khái niệm về tính trơn của xạ ảnh, ví dụ như một đường thẳng khả vi hoặc trơn nhẵn ( nhờ vào vào các loại cấu trúc vi phân đã được vận dụng ). Những phép đẳng cấu trong trường hợp này là là tuy nhiên ánh với mức độ đã được chọn theo sự khả vi .Theo hướng đối lập của sự trừu tượng, tất cả chúng ta hoàn toàn có thể vận dụng một cấu trúc trường thích hợp với mặt phẳng hình học, gây ra những mặt phẳng phức và những nghành nghề dịch vụ chính của giải tích phức. Những trường phức chỉ có hai phép đẳng cấu mà ly khai đường thẳng thực cố định , và thắt chặt, phép như nhau , phép phối hợp .Theo cùng cách như trong những trường hợp trong thực tiễn, mặt phẳng cũng hoàn toàn có thể được xem như là đa tạp phức đơn thuần nhất, một chiều ( trên trường số phức ), đôi lúc gọi chính là đường phức. Tuy nhiên, quan điểm này trái chiều với trường hợp mặt phẳng như một đa tạp thực 2 chiều. Các phép đẳng cấu đều chính là tuy nhiên ánh bảo giác của mặt phẳng phức, nhưng năng lực chỉ là những xạ ảnh tương ứng với những thành phần của một phép nhân 1 số ít phức với một phép tịnh tiến .Ngoài ra, hình học Euclide ( trong đó độ cong chỉ bằng không ở khắp mọi nơi ) không phải là hình học duy số 1 mà mặt phẳng hoàn toàn có thể có. Mặt phẳng hoàn toàn có thể được cho một dạng hình học hình cầu chỉ bằng cách sử dụng phép chiếu lập thể. Điều này hoàn toàn có thể coi như đặt một khối cầu trên mặt phẳng ( giống như một quả bóng trên sàn nhà ), vô hiệu điểm đầu, , và chiếu hình cầu lên mặt phẳng đến từ điểm này ). Đây chính là một trong những phép chiếu mà hoàn toàn có thể đã được sử dụng trong việc tạo ra một map phẳng của một phần của bề mặt Trái đất. Những dạng hình học thu đã được có độ cong dương liên tục .Ngoài ra, mặt phẳng cũng hoàn toàn có thể được cung cấp một chuẩn đo hệ mét mà mang lại cho nó mặt phẳng hyperbol có độ cong âm chưa đổi. Khả năng thứ hai là tìm thấy một ứng dụng trong thuyết tương đối đặc biệt quan trọng trong trường hợp đơn giản hoá, nơi có hai chiều khoảng trống , một chiều thời hạn. ( Các mặt phẳng hyperbol là một siêu mặt phẳng loại thời hạn trong khoảng trống Minkowski ba chiều. )
Ghi chú về hình học tôpô và hình học vi phân
Sự lan rộng ra compac tại một điểm của mặt phẳng là đồng phôi với hình cầu ( xem phép chiếu lập thể ) ; hình tròn trụ mở chính là đồng phôi với khối cầu có ” cực Bắc ” mất tích ; thêm điểm đó bổ trợ khối cầu ( compact ). Kết quả của sự lan rộng ra compac này là một đa tạp gọi tắt chính là khối cầu Riemann hay là đường xạ ảnh phức. Phép chiếu từ mặt phẳng Euclide đến một quả cầu mà chưa có một điểm là một map vi đồng phôi , và thậm chí còn bảo giác .Mặt phẳng bản thân là đồng phôi ( và vi đồng phôi ) đến một hình tròn mở. Đối với mặt phẳng hyperbol thì vi đồng phôi chính là bảo giác, nhưng so với những mặt phẳng Euclide không phải vậy .
Flat (geometry)Half-planeHyperplaneLine-plane intersectionPlane of incidencePlane of rotationPoint on plane closest to originProjective planeAnton, Howard (1994), Elementary Linear Algebra (ấn bản 7), John Wiley & Sons, ISBN 0-471-58742-7
LGBTQ chính là gì và tìm hiểu về cộng đồng LGBT hiện nay
Eves, Howard (1963), A Survey of Geometry, I, Boston: Allyn and Bacon, Inc.